产品:119
产品:119
 联系我们
联系我们

1、设定说明
这里把已经建立的IO信号设定为常用信号,主要是为了方便我们在示教器输入输出中查看信号和对信号进行各种操作。机器人断电重启以后一般会在输入输出中显示常用IO信号,手动自动状态人不干预情况下都可以显示默认状态显示的常用IO信号。
2、设定步骤
(1)ABB菜单——>控制面板——>常用IO配置——>进行配置常用IO信号并应用确认,之后再在ABB菜单——>输入输出中查看——>默认查看常用信号。
(2)具体操作图片
A:ABB菜单——>控制面板
B:控制面板——>常用IO配置
C:进行配置常用IO信号并应用确认
D:在ABB菜单——>输入中查看——>默认查看常用信号
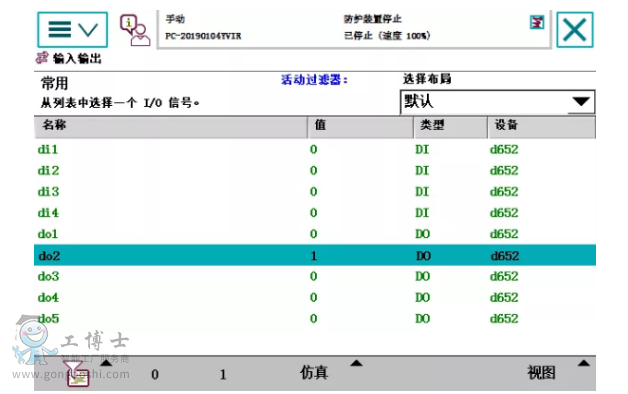
E:默认查看常用信号画面
二、信号查看方式
1、查看路劲
在ABB菜单——>输入中查看——>默认查看常用信号,一般设定常用信号以后,**次查看信号都是看到默认设定的信号,如果开始没设定常用IO信号,则开始进去是不显示信号,直到点击右下角视图的查看方式以后才会显示对应的信号选项。这里还有
2、查看方式
(1)进入常用信号画面:系统默认常用信号
(2)信号查看方式:视图中按照需要查看类型选项选择
(3)按信号IO设备查看
(4)按照信号的名称、类别设置查看信号
三、信号的强制仿真
1、输入信号的仿真功能操作
(1)仿真功能介绍
ABB机器人(其他工业机器人同)的仿真功能,是对建立好的IO信号进行虚拟仿真,可以设定对应信号为需要的设定值,但是这些信号处于仿真状态时候,设定的输出信号值对外部真实设备无效,或者输入信号不是外部真实信号有输入,信号仿真就是对信号的虚拟状态,仅仅在机器人系统编程中起作用,不对真实设备起作用,所以称为信号的仿真功能。
这里不管是数字输入、模拟输入还是组输入信号都可以仿真,同样对于数字输出、模拟输出和组输出信号都可以进行使用仿真功能,这里使用数字输入和数字输出信号进行演示说明。
(2)ABB菜单——>输入输出——>视图——>输入信号查看方式
(3)选择需要仿真的数字输入信号,点击下方仿真把数字输入信号切换到仿真状态,然后点击“1”或者“0”就可以对数字输入信号进行仿真。处于仿真状态的信号后面会有(Sim),取消仿真操作就可以直接单击取消仿真。
2、输出信号仿真功能操作
(1)输出信号查看画面
(2)输出信号仿真功能设定画面
四、输出信号的强制输出
1、输出信号强制输出说明
对于数字输出信号、模拟输出信号和组输出信号,都可以直接设定对应的输出值,给对应的控制设备进行操作动作。这里的给定值是对应输出信号的实际输出值,一般根据实际要求进行测试可以使用,可以检查接线是否正确和调试设备动作是否正确等作用。
2、设定数字输出强制输出图片
3、设定组输出信号强制输出图片
do01-do04地址0-3,go01地址为0-3。
五、机器人辅助按键关联
1、辅助按键作用
(1)ABB机器人辅助按键图片
(2)辅助按键作用简述
ABB机器人示教器上面有四个未定义使用功能的电动按钮,称为四个辅助按键。四个电动按键是用户可以自己定义使用的按钮开关,一般辅助按键真实中只对数字输出信号作用,数字输入信号不起作用。
辅助按键用户在使用时候,需要先把某个辅助按键和某个数字输出信号进行关联设定,然后才可以使用。一般辅助按键常用来和机器人夹具电磁阀、吹气、和外部其他设备进行定义关联,在调试程序时候方便手动调试控制设备。辅助按键的关联信号一般设定只在手动状态有效,自动状态无效。
2、辅助按键设定步骤
(1)步骤:ABB菜单——>控制面板——>配置可编程按键——>具体对四个辅助按键进行配置——>配置后使用。在测试使用辅助按键时候,对应关联的数字输出信号要先接线或者和通气正常。
(2)ABB菜单——>控制面板——>配置可编程按键
(3)具体对四个辅助按键进行配置
设定do01和辅助按键1图片:
设定do02和辅助按键2图片:
3、辅助按键输出状态说明
序号
按键操作
操作说明
1:切换
以信号当前值的置反操作,例如当前信号为0,按**下为1,按第二下为0,四个辅助按键为电动开关
2:设为1
把信号置1,例如当前信号为0,按下后即为1,再次按下也为1
3:设为0
把信号复位,例如当前信号为1,按下后即为0,再次按下也为0
4:按下松开
把按键按下不松开后,信号输出1,松开后,信号复位0
5:脉冲
按下按键后,对应数字输出时长1秒为1的信号。
六、ABB机器人IO接线说明和接线图
1、IO接线说明
在进行机器人接线之前有些接线基础,要会用常用的电工工具(例如一字十字螺丝刀、剥线钳、压线钳等),常用的电气元器件工作原理作用和接线(例如电动切换转换按钮开关、传感器、电磁阀、中间继电器、指示灯等),和常用的导线接线有基础(例如导线横截面积、导线对应载流电流、导线颜色等)。
接线时候要会看简单电路图,认识一些常用电气元器件的对应电气符号,根据电路接线图进行接线。接线时候记得买个控制回路都会形成一个回路去接线,电流都是从高电压流到低电压形成一个回路,一般常会有公共端,例如0V和24V的公共端口。
ABB机器人DSQC651标准IO板端口实物图:
根据ABB机器人的标准IO板接口,使用直流电压电流,得知机器人的输入的公共端是0V,输出的公共端是24V,在接线时候不管是输入输出接线都形成一个回路。ABB机器人自带有0V和24V,接线时候可以使用机器人内部自带的0V和24V;当多台机器人组成的工作流水线工作站时候,也可以使用外部的开关电源的0V和24V。
实物图中XS16机器人接口
端口
电压
端口
电压
1
24V
3
24V
2
0V
4
0V
接线时候一定要断电接线,接线完成以后要检查接线无误,然后才可以通电确保通电安全。
2、ABB机器人IO练习接线图
3、接线验证
验证说明:这里接线完成,建立对应IO信号之后,重启信号生效,然后在输入输出画面中查看和对信号进行控制操作等,例如下面画面: