
 产品:119
产品:119
 联系我们
联系我们
1)现场有半径为5mm的小圆要切割,若直接使用普通MoveC指令,实际走出的轨迹效果并不理想。
2)对于切割小圆,机器人可以使用WristMove(即机器人运动时只动作腕关节)功能,该功能包含于687-1AdvancedRobot Motion选项中
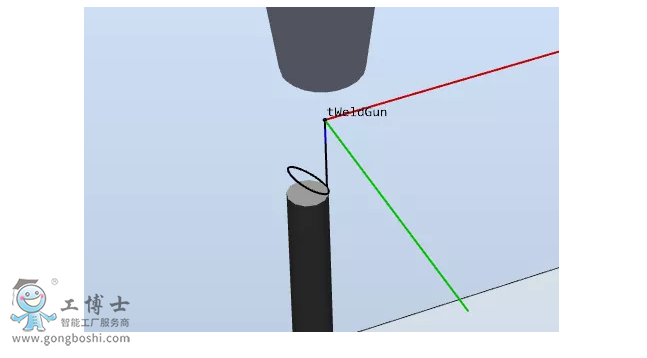
4)机器人运行的轨迹实际并非圆,而是如上图的轨迹,但在工具Z的延伸方向,轨迹为标准圆,即切割的结果为标准圆。
5)圆的起点的tcp的Z方向确定了切割平面。稍后完成的切割圆在该平面。
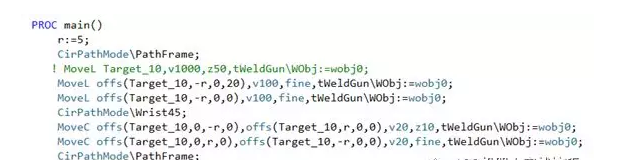
6)代码如下:
 产品分类
产品分类联系热线:15021260663 联系人:徐鹤 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 ABB工业机器人配件服务商